
Controlando Posiciones – El Mini Servo
LECCIÓN 04
Para obtener tu recompensa debes estar registrado en nuestra plataforma y publicar tu trabajo
🧠 ¿Qué aprendo?
- Comprender el funcionamiento de un servomotor
- Conexión del servomotor a nuestro robot
- Escribir un ángulo de movimiento para el Gripper o Garra de nuestro robot
📝 Conocimientos previos
- Señales digitales
- Variables
- Uso de condicionales
- Comunica serial
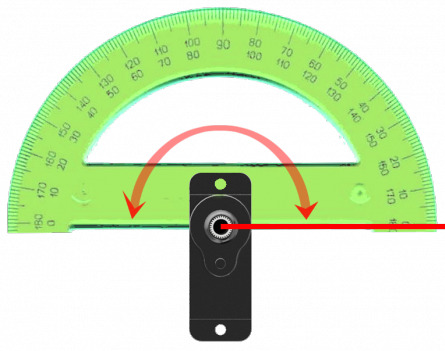
🖥️ El Servomotor
💡 Un servomotor es un pequeño motor que es capaz de girar entre 0 y 180 grados. Lo interesante de los servomotores es que nosotros decidimos a qué posición o ángulo deben moverse.
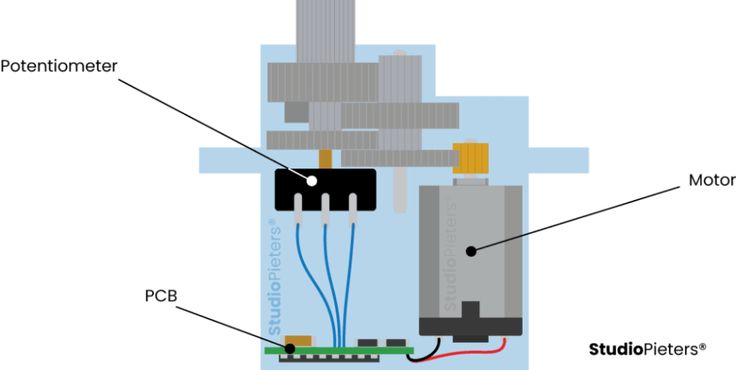
🖥️ Interior del Servomotor
💡 El servomotor, es un motor DC con la capacidad de ubicar su eje en una posición o ángulo determinado, internamente tiene una caja reductora la cual le aumenta el torque y reduce la velocidad, un potenciómetro encargado de medir la posición del eje y una pequeña tarjeta electrónica que junto al potenciómetro forman un control de lazo cerrado.
⚠️ Importante: Si utilizas muchos servomotores junto al puerto USB de tu computadora puede que no haya suficiente energía para alimentarlos a todos. Siempre que utilices servomotores recuerda alimentarlos mediante el porta pilas. Recibirán mucha más energía a la hora de moverse.
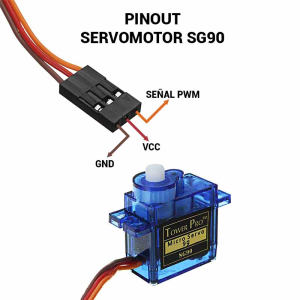
🖥️ El Mini Servo SG 90
💡 Servomotor de tamaño pequeño ideal para proyectos de bajo torque y donde se requiera poco peso. Muy usado en aeromodelismo, pequeños brazos robóticos y mini artrópodos. Un servo ideal para aprender a programar en Arduino.
📋 Ejemplo N° 1: Moviendo el Servomotor
➡️ Ingresamos a la Cuenta de ArduinoBlocks de miMakerHouse y en «Correo electrónico» colocamos nuestro nombre de usuario (NombreApellido.bmaker)
💻 Descripción
🧠 Vamos a hacer un pequeño ejercicio para averiguar cómo funciona el servomotor. Queremos mover el mini servo al ángulo de 90°
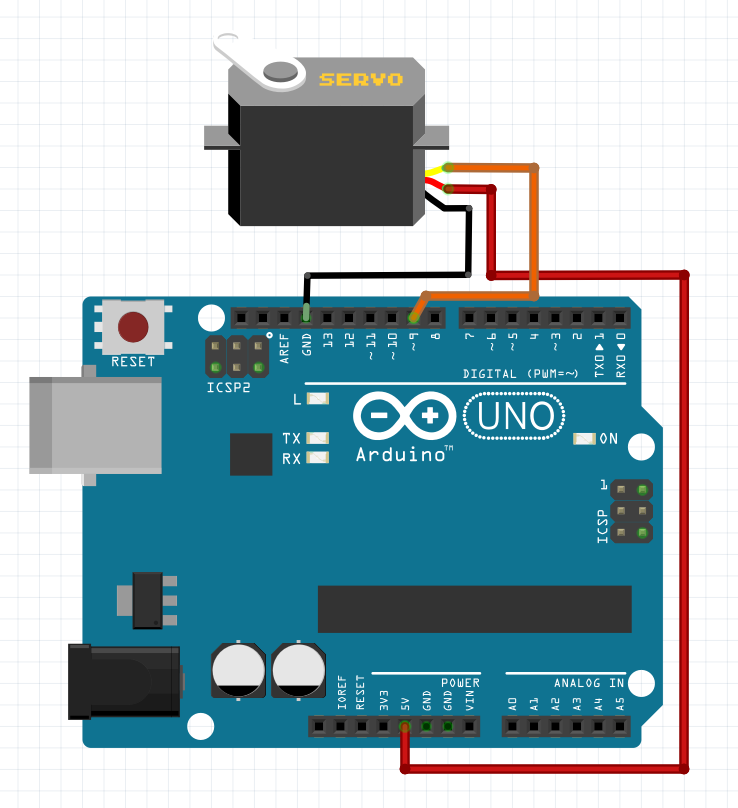
💻 Circuito
💻 Código ArduinoBlocks
💡 Lo primero que realizaremos será colocar el bloque de configuración de motores en el bloque Inicializar.
ArduinoBlocks

🧠 Se debe tener en cuenta lo siguiente:
- Pin 9 -> Pin de control del servomotor
- Grados Ángulo 90° -> Ángulo al cuál se posicionará el servomotor
- Retardo (ms) 100 -> Tiempo de espera para que el motor realice su movimiento
💻 Código Arduino
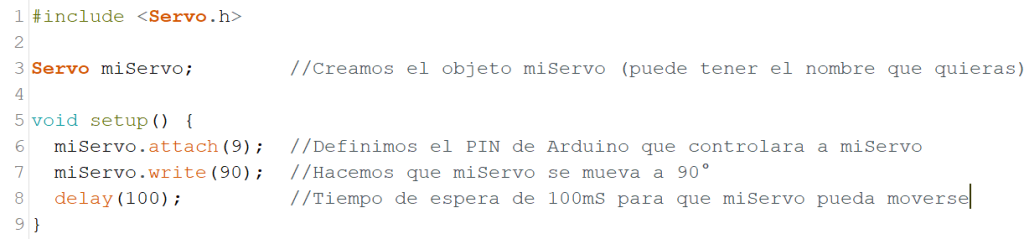
⚠️ Importante: Todos los servomotores del mercado pueden experimentar vibraciones en los ángulos 0º o 180º. Esto se produce debido a las tolerancias de fabricación y puede acortar la vida de tu motor. Si tu servo vibra en estos ángulos prográmalos para moverse a un ángulo cercano como 10º o 170º para evitar dichas vibraciones.
⚔️Desafío 01: Demuestra lo aprendido
💰Recompensa: 30 Monedas de Oro – 15 Cristales de Experiencia
🧠 Utiliza la información del ejercicio «Moviendo el Servomotor» para que el servomotor SG90 pueda moverse a 10°, 170° y después quedarse quieto en 90° con un tiempo de espera de 1 segundo después de cada movimiento.
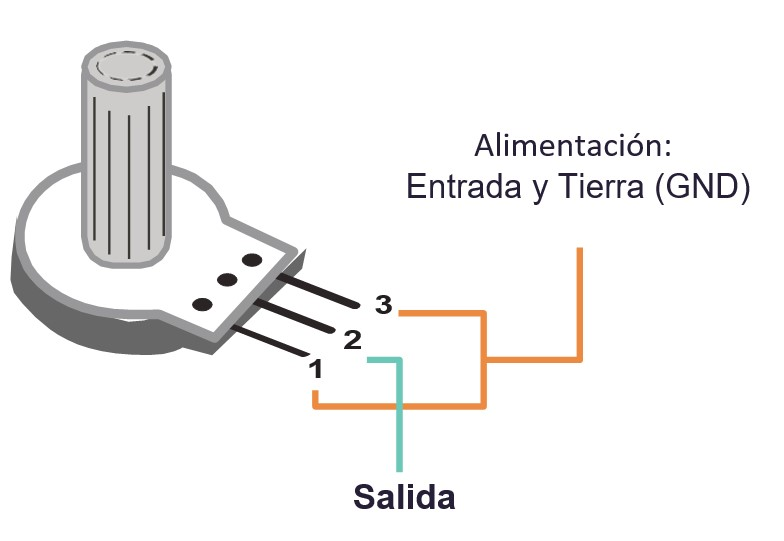
🖥️ El Potenciómetro – Sensor Analógico
💡 Un potenciómetro es un resistor eléctrico con un valor de resistencia variable y que puede ajustarse de manera manual.
📋 Ejemplo N° 2: Lectura de datos con el potenciómetro
💻 Descripción
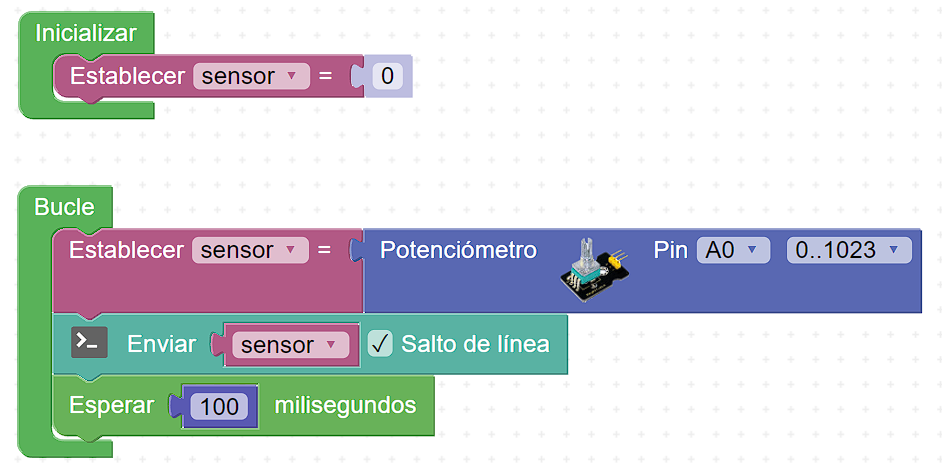
🧠 Realizar la programación para ver la información que arroja un potenciómetro.
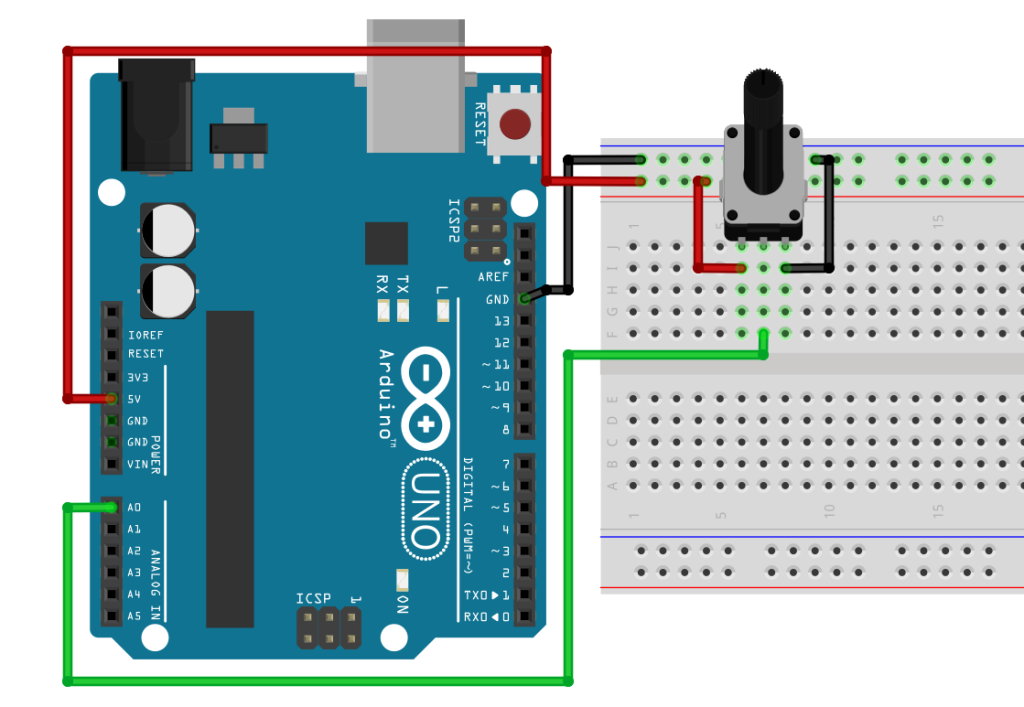
💻 Circuito
💻 Código ArduinoBlocks
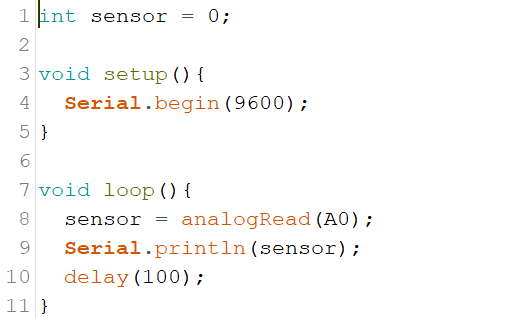
💻 Código Arduino
📋 Ejemplo N° 3: Control de Movimiento del Servomotor con un Potenciómetro
💻 Descripción
🧠 Realizar la programación para controlar el giro del servomotor con un potenciómetro
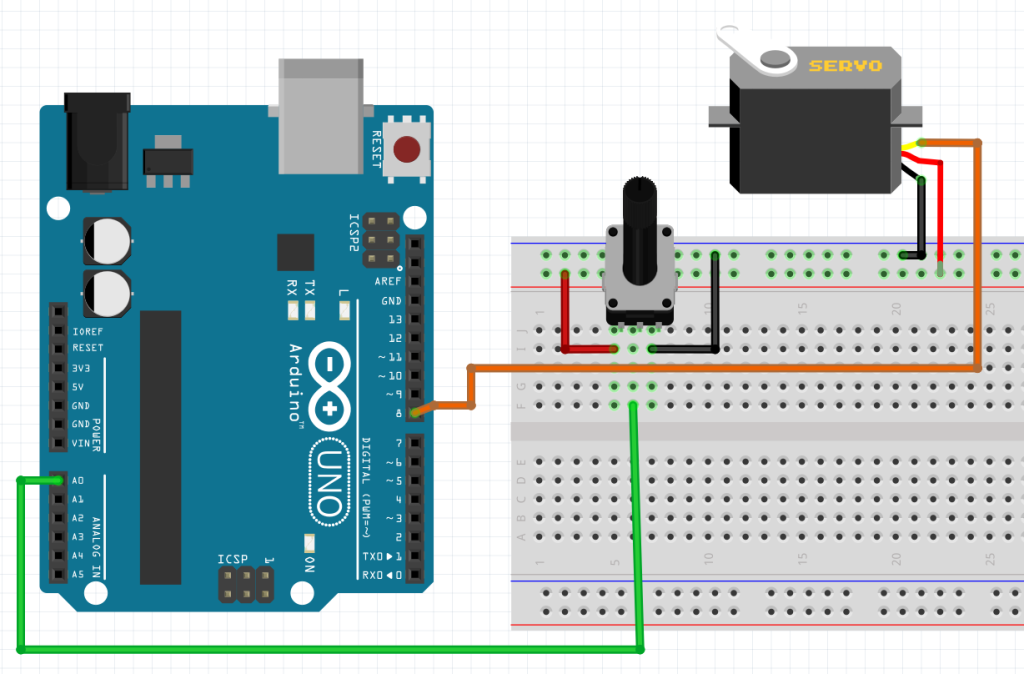
💻 Circuito
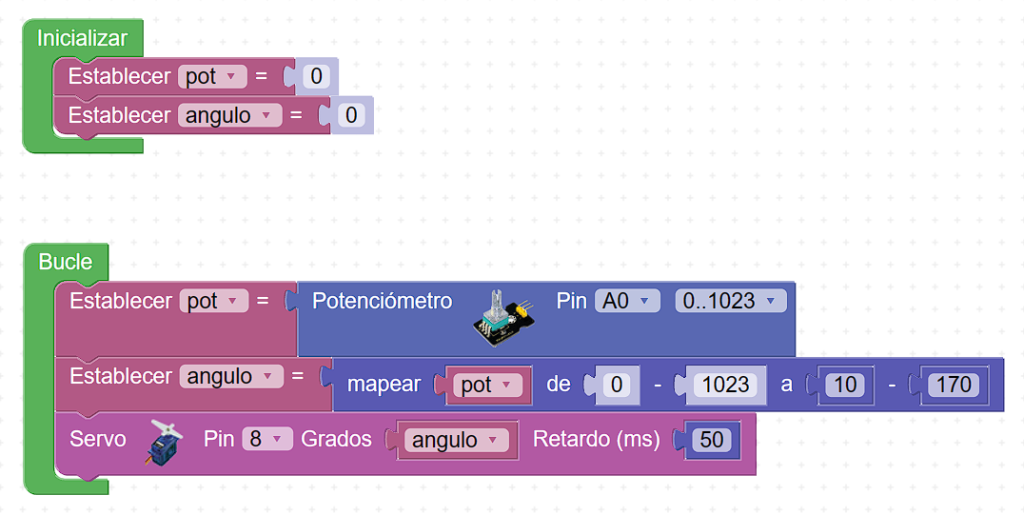
💻 Código ArduinoBlocks
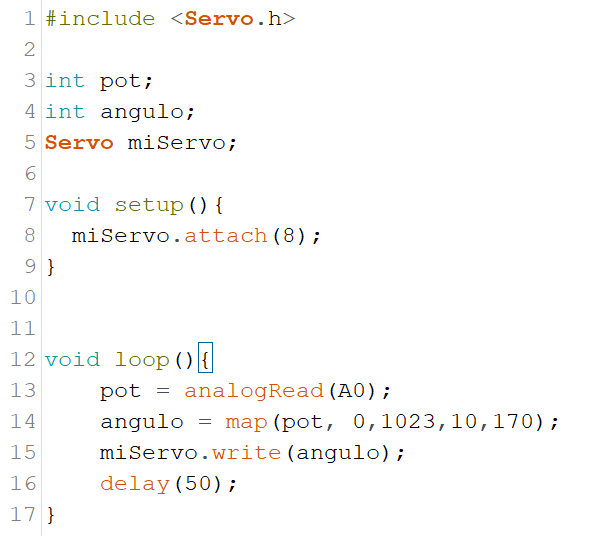
💻 Código Arduino
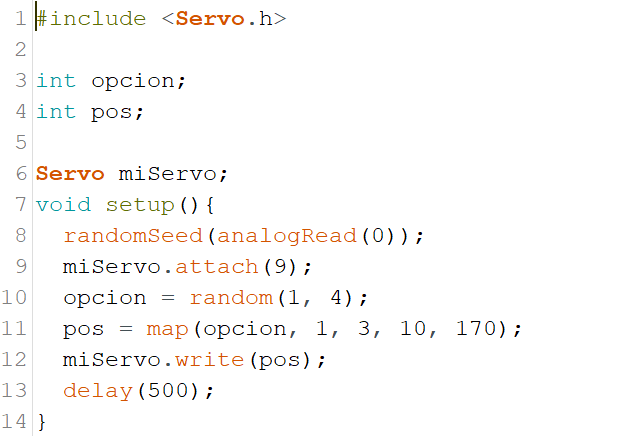
📋 Ejemplo N° 4: Posiciones Aleatorias
💻 Descripción
🧠 Realizar la programación para que el Servomotor se mueva a posiciones aleatorias
💻 Circuito
💻 Código ArduinoBlocks

💻 Código Arduino
⚔️Desafío 02: Demuestra lo aprendido
💰Recompensa: 30 Monedas de Oro – 15 Cristales de Experiencia
🧠
¡Estamos listos, a construir!
💰Recompensa: 10 Monedas de Oro – 5 Cristales de Experiencia
➡️ RETO 01:
➡️ RETO 02:
Recuerda
🧠 Los servomotores son ideales para crear multitud de máquinas y robots, podrás controlar a qué ángulo se moverá un brazo, un engranaje, o cualquier otro mecanismo. Usa servomotores y controlarás tus inventos con total precisión.
